














 18 / 24
18 / 24

Localizing when and where the
actions take place in a video. For
example, you have somebody that is
diving in this amazing swimming pool
and you want to find out where
exactly this human is, spatially on the
frame-level, and when his action
starts and ends temporally. Until
today, state of the art works focused
on tackling the problem more at a
frame-level. They use per frame
detectors that detect the actions at a
frame level, then they link the actions
over time to create spatio-temporal
tubes. There is a lot of good in this
method and there have been
improvements over the years, but it
has some basic disadvantages. It
doesn’t exploit the temporal
continuity of
videos.
Imagine
somebody in this position. Am I sitting
down or standing up?
I think you are standing up with your
knees bent.
I am sitting down right now.
You are. What’s the story?
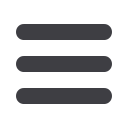
We propose to surpass this limitation
and instead of working on a frame
level, we work on a sequence of
frames. We propose an action-tubelet
detector that takes a simple sequence
of frames and outputs tubelets. In the
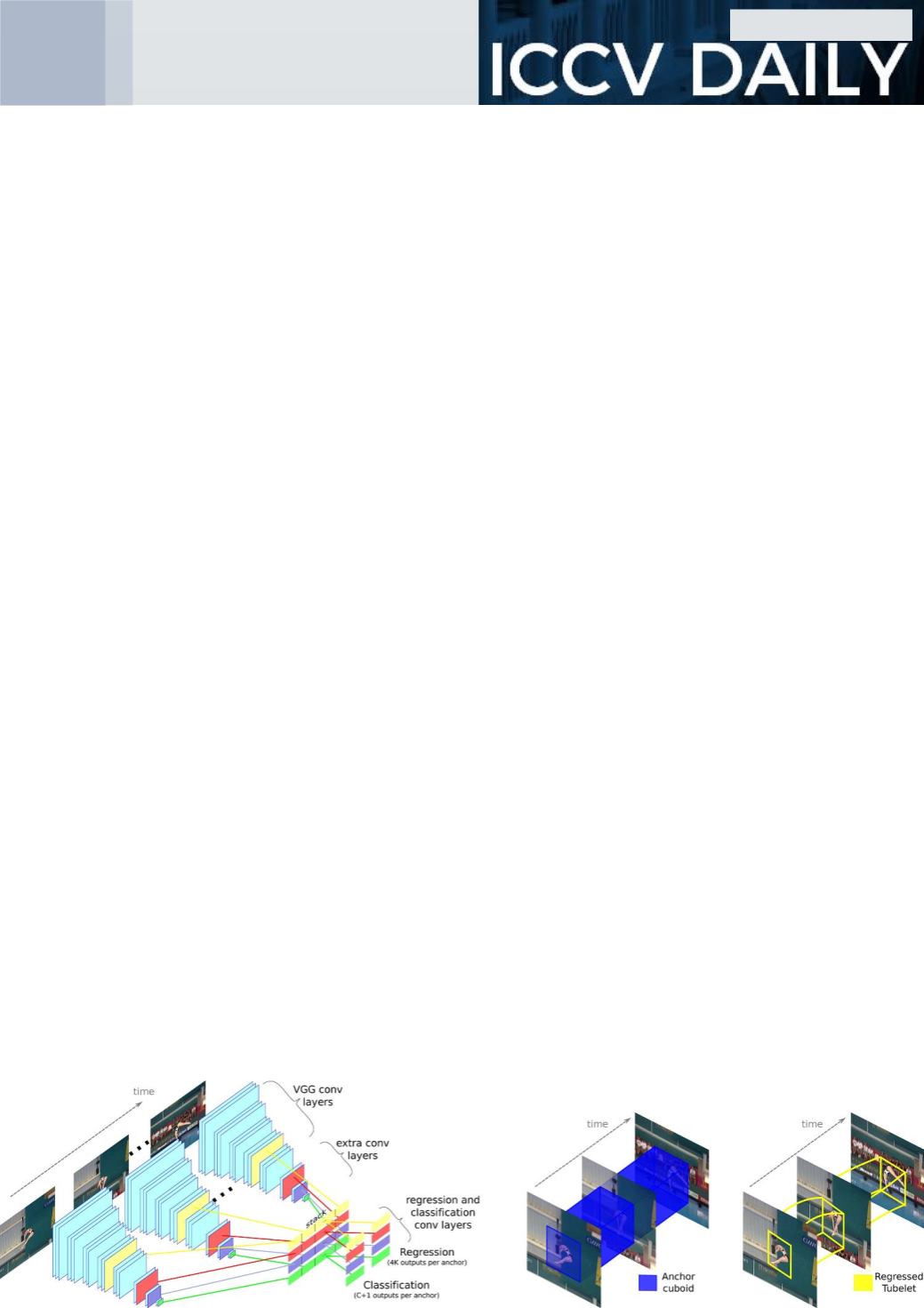
way that standard object detectors
work, we extend the anchor boxes of
standard detectors to anchor cuboids
that have a fixed spatial extent over
time. We regress the anchor cuboids
in order to follow the movement of
the actor. We try to say, where the
actor is, it will be like this, going up
and down. This is the regression part,
and the classification – which basically
means to put a label on what
somebody is doing – like running,
kicking a ball, or any action label. To
do so, given sequences of K frames,
we deploy K parallel streams, one for
each of the input frames. We learn
our action tubelet detector jointly for
all parallel streams, where the weights
are shared amongst all the streams. In
the end, we concatenate the features
coming from each stream, then we
classify and regress the anchor cuboid
to produce the tubelet, which is what
we want.
What is interesting there is that the
features are learned jointly; however,
the regression is done per frame from
features that are learned jointly over
the whole sequence.
The
classification, putting the action label
into the sequence, is consistent over
the whole tubelet. That enforces
consistency of the actions over time.
What feature would you add to the
model that it doesn’t have today?
I could tell you millions of them! What
matters though is what I think people
who work on action localization or
18
Friday
Vicky Kalogeiton