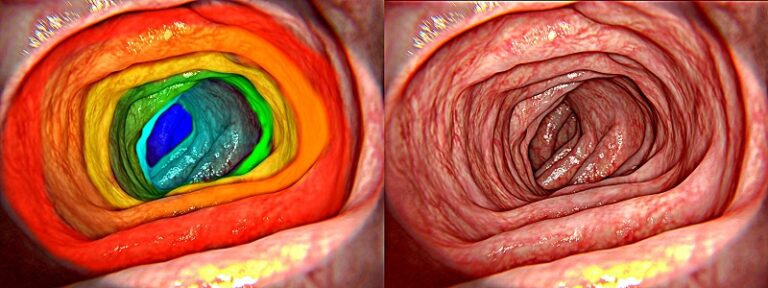
Real time SLAM in Endoscopy Applications
A family of algorithms called simultaneous localization and mapping (SLAM) are able, in real time, to create a 3D map of a scene captured by a camera and calculate with very high accuracy the location of the camera in the scene. As a result, RSIP Vision’s engineers are able to create a precise 3D model of the endoscope environment and calculate its exact location in that model.
Read More

Multi-modal registration of retina images
Is it possible to perform combination of fundus images coming from different imaging equipment or technologies and taken from different angles? RSIP Vision apparently can, since we used our expertise in computer vision for ophthalmology to provide software to a client who wanted to combine direct images of the fundus with fluorescein images, which need to be reconstructed before being connected together to form a more detailed image. The end result provides ophthalmologists with detailed images of the retina, ensuring more efficient and accurate patient diagnosis.
Read More