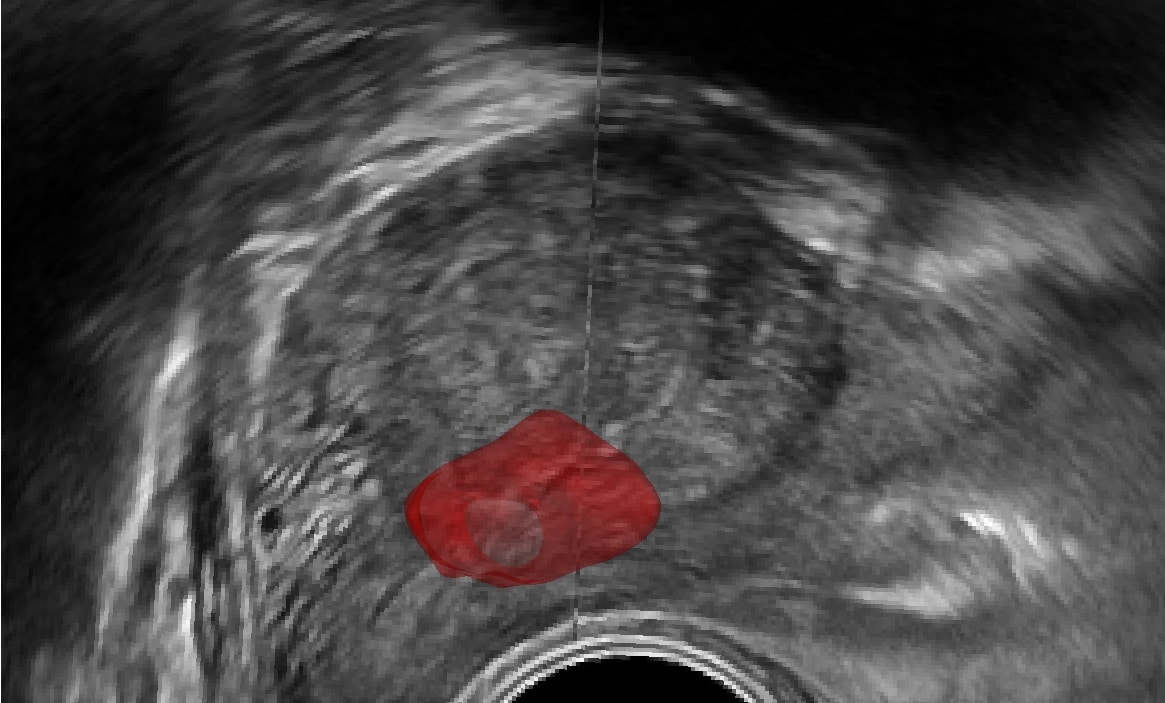
Approximately one million prostate biopsies are performed each year in the United States to diagnose and monitor prostate cancer. Doctors commonly use transrectal ultrasound (TRUS) to generate real-time images of the prostate to help guide the biopsy. To mitigate the risk of missing a lesion, physicians usually carry out multiple collections from the gland. Nonetheless, there is a risk that some tumors may go undetected. Therefore, it is common practice for the patient to have a pre-op MRI scan, which generates a more detailed image of the prostate. This provides the physician with a more accurate depiction of the organ and lesions.
The pre-op MRI scan must be registered with the live ultrasound image, to enable the physician to accurately locate lesions in real time. Registration of non-rigid tissue is challenging, as tissue moves during the procedure, for example when the patient breathes or when the US probe is inserted and applies pressure on the surrounding area. In addition, pre-op MRI images may be acquired some time before the procedure, such that the anatomical representation captured in the pre-op scan has altered before the ultrasound is performed. Tissues may deform, distorting the live image compared to the pre-op image, making it difficult to superimpose them accurately.
Physicians often use naive registration to merge live ultrasound images to pre-op MRI scans. In this method, tissue motion is assumed to be rigid, which allows for simpler mathematics and algorithms. However, the assumption of rigid motion is coarse and may lead to mistakes in positioning tumors correctly. Furthermore, naive registration relies heavily on the surgeon’s knowledge and expertise to compensate for any differences between the live ultrasound and pre-op MRI images that may occur as a result of tissue movement. A limited number of physicians are qualified to perform this technique, which is time-consuming and susceptible to human subjectivity.
RSIP Vision is developing sophisticated technology to perform non-rigid registration to account for soft tissue motion during procedures. AI algorithms are trained to predict tissue distortion, allowing for live ultrasound images to be accurately merged with pre-op MRI scans. This provides the surgeon with a detailed MRI image that is overlaid on a real-time ultrasound, allowing for quick and accurate detection of tumors.
In addition, RSIP Vision uses probe tracking in a wide variety of navigation systems. These systems provide position and orientation data using external hardware. This provides better inputs for the algorithms generating more detailed information for physicians. Tracking devices allow for precise localization of every pixel in the ultrasound image, leading to more accurate lesion localization.
At RSIP Vision we are utilizing AI and computer vision in combination with advanced tracking hardware to improve the speed and accuracy of imaging-based navigation systems. These methods will enhance detection and evaluation of tumors to ultimately improve the diagnosis and treatment of prostate cancer. Contact us today to learn how you can implement these techniques for improved clinical results.
 Urology
Urology



